Di demên dawî de, hevalekî xerîdar ê JSR projeyek tanka zextê ya robotî ya qeymaqê li gorî daxwazê amade kir. Perçeyên kar ên xerîdar xwedî taybetmendiyên cûrbecûr in û gelek parçe hene ku werin qeymaqkirin. Dema ku çareseriyek otomatîkî ya yekbûyî tê sêwirandin, pêdivî ye ku were piştrast kirin ka xerîdar qeymaqkirina rêzdar an qeymaqkirina xalî dike û dûv re bi tevahî robotê bikar tîne. Divê were kirin. Di vê heyamê de, min dît ku gumanên wî di derbarê hilbijartina pozîsyoner de hebûn, ji ber vê yekê JSR bi kurtî ew ji her kesî re da nasîn.
Pozîsyona Serî û Dûvikê ya Vertikal a Du-stasyonî ya Yek-eksenî
Pozîsyonerê Veguhestina Vertikal a Sê-eksenî ya VS
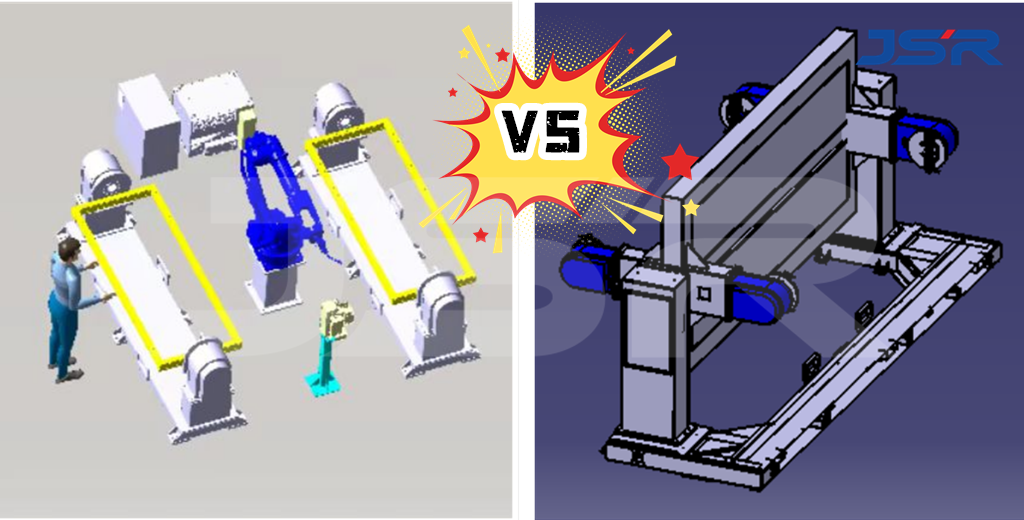
Di stasyona kar a welding robot de, pozîsyonera zivirîna vertîkal a du-qereqolî ya serî û dûvikê ya yek-eksenî û pozîsyonera zivirîna vertîkal a sê-eksenî du alavên pozîsyonkirinê yên hevpar in, û di senaryoyên serîlêdanê yên cûda de xwedî avantajên xwe ne.
Senaryoyên serlêdana wan û berawirdkirinên wan ên jêrîn hene:
Pozîsyonerê çarçoveyî yê serî û dûvikê yê yek-eksenî yê du-stasyonî:
Ew ji bo senaryoyên ku pêdivî ye ku perçeya kar di dema pêvajoya kaynakirinê de were zivirandin û bicihkirin guncaw e. Mînakî, di xeta hilberîna kaynakirina laşê otomobîlê de, du perçeyên kar dikarin di heman demê de li du îstasyonan werin saz kirin, û zivirandin û bicihkirina perçeyên kar dikare bi rêya pozîsyonerek serî û dûvikê ya yek-eksenî were bidestxistin, bi vî rengî karîgeriya hilberînê baştir dike.
https://youtube.com/shorts/JPn-iKsRvj0
Pozîsyonera zivirîna sê-eksenî ya vertîkal:
Ji bo senaryoyên tevlihev ên kaynakirinê yên ku hewceyê zivirandin û lêvgerandina perçeyên kar di gelek aliyan de ne îdeal e. Mînakî, di pîşesaziya hewavaniyê de, kaynakirina tevlihev a fuselageyên balafiran pêdivî ye. Pozîsyonerê lêvgerandina vertîkal a sê-eksenî dikare zivirandina pir-eksenî û lêvgerandina perçeya kar di aliyên horizontî û vertîkal de pêk bîne da ku hewcedariyên kaynakirinê di goşeyên cûda de bicîh bîne.
https://youtu.be/v065VoPALf8
Berawirdkirina avantajan:
Pozîsyonerê çarçoveyî yê serî û dûvikê yê yek-eksenî yê du-stasyonî:
- Avahiyek hêsan, xebitandin û domandina wê hêsan e.
- Du perçeyên kar dikarin di heman demê de werin pêvajoy kirin da ku karîgeriya hilberînê baştir bikin.
- Ji bo hin karên weldingê yên hêsantir, wekî perçeyên kar ên ku hewceyê yek eksena zivirînê ne, minasib e.
- Bihayê ji pozîsyona sê-axê ya vertîkal erzantir e.
- Qeymaqkirin di navbera îstasyona çep û rastê de tê guhertin. Dema ku li îstasyonekê qeymaqkirin tê kirin, karker hewce ne ku materyalan li aliyê din bar bikin û daxin.
Pozîsyonera zivirîna sê-eksenî ya vertîkal:
- Ew dikare zivirandin û zivirandina pir-aksena pêk bîne û ji bo karên tevlihev ên weldingê minasib e.
- Di dema kaynakirina robotan de, karker tenê hewce ne ku barkirin û dakêşana parçeyên kar ji yek alî ve temam bikin.
- Nermbûn û rastbûna pozîsyonê bêtir peyda dike, ku dikare hewcedariyên goşeyên cûda yên welding bicîh bîne.
- Ji bo perçeyên kar ên bi kalîteya welding û hewcedariyên rastbûnê yên bilind minasib e.
Bi kurtasî, hilbijartina pozîsyonerek guncaw bi hewcedariyên karê weldingê yên taybetî ve girêdayî ye, di nav de faktorên wekî tevliheviya perçeyê kar, goşeya weldingê, karîgeriya hilberînê û hewcedariyên kalîteya weldingê.
Dema şandinê: 20ê Sibatê 2024
